Learning how to use an E-Ink display, and GeoPy, Open-Meteo python libraries.
I’ve recently been using a Waveshare 2.3″ E-Ink display hat for various Raspberry Pi hardware. There are a number of projects out there that use this cute little display, and I would like the throw some of my code into the arena. To help learn python and the E-ink display, I’ve created a little weather app.
All the code is posted to my Github Repository. This code is a work in progress, and basically just a test piece, there really no error control.
I’m assuming that you have your Waveshare 2.13in E-Ink display correcly setup with your hardware. I’m using Waveshare 2.13in E-Ink display HAT V4 connected to a Raspberry Pi Zero 2W. If you haven’t set it up yet, visit https://www.waveshare.com/wiki/2.13inch_e-Paper_HAT_Manual and follow the directions for your hardware.
This next step is for use with Raspberry Pi hardware.
Install the necessary python libraries:
sudo apt update
sudo apt install python3-pip
sudo apt install python3-pil
sudo apt install python3-numpy
sudo apt install python3-gpiozero
sudo pip3 install spidevFor WeatherInk.py, GeoPy and Open-Meteo libraries are needed:
pip install openmeteo-requests
pip install requests-cache retry-requests numpy pandas
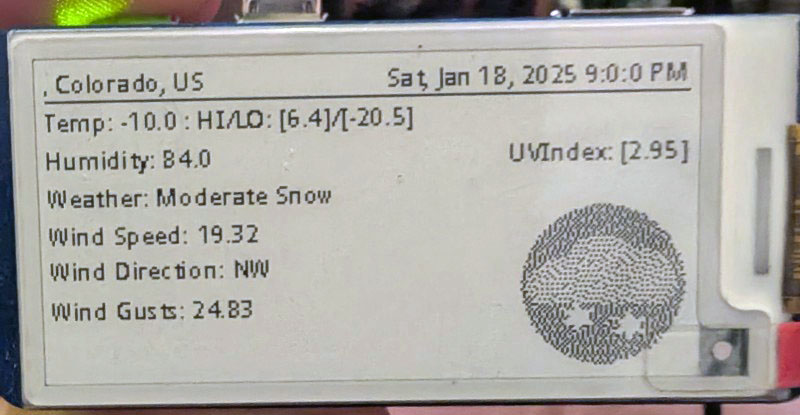
pip install geopyWeatherInk.py takes Latitude and Longitude coordinates and returns weather information, and displays it on an E-Ink display. I wrote this as an exercise to use an E-Ink display, and get weather info. The GPS function was a bonus. There are still issues with the code, throws an error when trying to convert GPS coordinates to a place without name, etc. Use at your own risk. Weather icons and font.ttc must be downloaded from my github
weatherink.py:
# /*****************************************************************************
# * | File : weatherink.py
# * | Author : Michael Bapst (lynxsilver@gmail.com)
# * | Function : Retrieves Weather from Open-Meteo and Displays it on a
# * | : Waveshare 2.13in E-Ink Display
# * | Info : I wrote this as an exercise to use an E-Ink display, and
# * | : get weather info. The GPS function was a bonus.
# * | : There are still issues with the code, throws an error when
# * | : trying to convert GPS coordinates to a place without name,
# * | : etc.
# *----------------
# * | This version: V1.0
# * | Date : 1/18/2025
# * | Info :
# ******************************************************************************
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documnetation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS OR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
#*****************************************************************************
# The following libraries need to be installed:
# Install Open Meteo:
# pip install openmeteo-requests
# pip install requests-cache retry-requests numpy pandas
#
# Install geopy
# pip install geopy
import sys
import os
import logging
import epd2in13_V4
import time
from PIL import Image,ImageDraw,ImageFont
import traceback
import openmeteo_requests
from convertweather import convertUnixTime, RoundTemp, RoundWindSpeed, HeadingToCompass, DecodeWeatherCode, SecToHours, GetCity
import requests_cache
import pandas as pd
from retry_requests import retry
# Setup the Open-Meteo API client with cache and retry on error
cache_session = requests_cache.CachedSession('.cache', expire_after = 3600)
retry_session = retry(cache_session, retries = 5, backoff_factor = 0.2)
openmeteo = openmeteo_requests.Client(session = retry_session)
# For more information about Open-Meteo goto https://open-meteo.com/en/docs
# Make sure all required weather variables are listed here
# The order of variables in hourly or daily is important to assign them correctly below
# Change the Lat & Lon to the area you want weather info from. use https://open-meteo.com/en/docs to get your Lat & Lon
url = "https://api.open-meteo.com/v1/forecast"
params = {
"latitude": 64.1355,
"longitude": -21.8954,
"current": ["temperature_2m", "relative_humidity_2m", "weather_code", "wind_speed_10m", "wind_direction_10m", "wind_gusts_10m"],
"daily": ["weather_code", "temperature_2m_max", "temperature_2m_min", "sunrise", "sunset", "daylight_duration", "sunshine_duration", "uv_index_max"],
"temperature_unit": "fahrenheit",
"wind_speed_unit": "mph",
"precipitation_unit": "inch",
"timezone": "America/New_York",
"forecast_days": 1
}
responses = openmeteo.weather_api(url, params=params)
# Process first location. Add a for-loop for multiple locations or weather models
response = responses[0]
wAddress = GetCity(response.Latitude(), response.Longitude())
# Current values. The order of variables needs to be the same as requested.
current = response.Current()
wTemp = round(current.Variables(0).Value(), 1)
wHumid = current.Variables(1).Value()
wWeatherCode, wIcon = DecodeWeatherCode(current.Variables(2).Value())
wWindSpd = round(current.Variables(3).Value(), 2)
wWindDir = HeadingToCompass(current.Variables(4).Value())
wWindGust = round(current.Variables(5).Value(), 2)
wDateTime = convertUnixTime(current.Time())
# Process daily data. The order of variables needs to be the same as requested.
daily = response.Daily()
wTempHi = RoundTemp(daily.Variables(1).ValuesAsNumpy())
wTempLo = RoundTemp(daily.Variables(2).ValuesAsNumpy())
wUVIndex = daily.Variables(7).ValuesAsNumpy()
#Setup WaveShare 2.13 V4
epd = epd2in13_V4.EPD()
epd.init()
#epd.Clear(0xFF)
# Drawing on the image
fontObj = ImageFont.truetype('font.ttc', 10)
wImage = Image.new('1', (epd.height, epd.width), 255) # 255: clear the frame
draw = ImageDraw.Draw(wImage)
draw.text((0, 0), wAddress, font = fontObj, fill = 0)
draw.line([(0,13),(250,13)], fill = 0,width = 1)
draw.text((250, 0), wDateTime, font = fontObj, fill = 0, anchor = "ra")
draw.text((0, 15), "Temp: " + str(wTemp) + " : HI/LO: " + str(wTempHi) + "/" + str(wTempLo), font = fontObj, fill = 0)
draw.text((0, 30), "Humidity: " + str(wHumid), font = fontObj, fill = 0)
draw.text((250, 30), "UVIndex: " + str(wUVIndex), font = fontObj, fill = 0, anchor = "ra")
draw.text((1, 45), "Weather: " + wWeatherCode, font = fontObj, fill = 0) #Setting the position to 2 keeps the W in weather from getting cut off
draw.text((1, 60), "Wind Speed: " + str(wWindSpd), font = fontObj, fill = 0)
draw.text((1, 75), "Wind Direction: " + str(wWindDir), font = fontObj, fill = 0)
draw.text((1, 90), "Wind Gusts: " + str(wWindGust), font = fontObj, fill = 0)
bmpIcon = Image.open(os.path.join(os.path.dirname(__file__), wIcon))
wImage.paste(bmpIcon,(185,57))
wImage = wImage.rotate(180) # rotate
epd.display(epd.getbuffer(wImage))
# Exit
epd.init()
epd.sleep()
epd2in13_V4.epdconfig.module_exit(cleanup=True)
exit()convertweather.py
# /*****************************************************************************
# * | File : convertweather.py
# * | Author : Michael Bapst (lynxsilver@gmail.com)
# * | Function : Various conversion functions used by Weather Ink python app
# * | Info :
# *----------------
# * | This version: V1.0
# * | Date : 1/18/2025
# * | Info :
# ******************************************************************************
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documnetation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS OR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
#*****************************************************************************
#
# Install geopy : pip install geopy
#
from geopy.geocoders import Nominatim
from geopy.exc import GeocoderServiceError
from datetime import datetime
import numpy as np
def GetCity(Lat, Lon):
geolocator = Nominatim(user_agent="E-Ink_Weather_App")
try:
location = geolocator.reverse(str(Lat) + "," + str(Lon))
address = location.raw['address']
# Traverse the data
city = address.get('city', '')
state = address.get('state', '')
code = address.get('country_code')
addrss = city + ", " + state + ", " + code.upper()
return addrss
except GeocoderServiceError as e:
print("Error: ", e)
return "ERROR"
def convertUnixTime(UnixTime):
# Convert UNIX time to Modern
return datetime.utcfromtimestamp(UnixTime).strftime('%a, %b %-d, %Y %-I:%-M:%-S %p')
def RoundTemp(Temperature):
# Cleanup temperature
return np.round(Temperature, 1)
def RoundWindSpeed(WindSpeed):
# Cleanup Wind Speed
return np.round(WindSpeed, 2)
def HeadingToCompass(Heading):
# Convert Heading to Compass points (N-NE-E-SE-S-SW-W-NW)
# Converts a heading in degrees to a compass direction.
directions = ["N", "NNE", "NE", "ENE", "E", "ESE", "SE", "SSE",
"S", "SSW", "SW", "WSW", "W", "WNW", "NW", "NNW"]
index = round(Heading / 22.5) % 16
return directions[index]
def DecodeWeatherCode(WeatherCode):
match WeatherCode:
case 0:
return "Clear Sky", "icon/wmo_icon_00d.bmp"
case 1:
return "Mainly Clear", "icon/wmo_icon_01d.bmp"
case 2:
return "Partly Cloudy", "icon/wmo_icon_02d.bmp"
case 3:
return "Overcast", "icon/wmo_icon_03d.bmp"
case 45:
return "Fog", "icon/wmo_icon_45d.bmp"
case 48:
return "Freezing Fog", "icon/wmo_icon_45d.bmp"
case 51:
return "Light Drizzle", "icon/wmo_icon_53d.bmp"
case 53:
return "Moderate Drizzle", "icon/wmo_icon_53d.bmp"
case 55:
return "Heavy Drizzle", "icon/wmo_icon_53d.bmp"
case 56:
return "Light Freezing Drizzle", "icon/wmo_icon_57d.bmp"
case 57:
return "Heavy Freezing Drizzle", "icon/wmo_icon_57d.bmp"
case 61:
return "Light Rain", "icon/wmo_icon_61d.bmp"
case 63:
return "Moderate Rain", "icon/wmo_icon_61d.bmp"
case 65:
return "Heavy Rain", "icon/wmo_icon_65d.bmp"
case 66:
return "Light Freezing Rain", "icon/wmo_icon_66d.bmp"
case 67:
return "Heavy Freezing Rain", "icon/wmo_icon_67d.bmp"
case 71:
return "Light Snow", "icon/wmo_icon_71d.bmp"
case 73:
return "Moderate Snow", "icon/wmo_icon_73d.bmp"
case 75:
return "Heavy Snow", "icon/wmo_icon_75d.bmp"
case 77:
return "Snow Pellets", "icon/wmo_icon_75d.bmp"
case 80:
return "Light Rain Showers", "icon/wmo_icon_80d.bmp"
case 81:
return "Moderate Rain Showers", "icon/wmo_icon_81d.bmp"
case 82:
return "Heavy Rain Showers", "icon/wmo_icon_81d.bmp"
case 85:
return "Light Snow Showers", "icon/wmo_icon_85d.bmp"
case 86:
return "Heavy Snow Showers", "icon/wmo_icon_86d.bmp"
case 95:
return "Thunderstorms", "icon/wmo_icon_95d.bmp"
case 96:
return "Thunderstorms with Light Hail", "icon/wmo_icon_96d.bmp"
case 99:
return "Thunderstorms with Heavy Hail", "icon/wmo_icon_96d.bmp"
case _:
return "Invalid Weather Code", "icon/wmo_icon_err.bmp"
def SecToHours(seconds):
numHr = np.round(int(seconds/3600), 0)
numMin = np.round(int((seconds%3600)/60), 0)
numSec = np.round(int((seconds%3600)%60), 0)
#strHr = ["{:0f} hrs {:0f} mins {:0f} secs".format(float(numHr), float(numMin), float(numSec))]
strHr = ["{} hrs {} mins {} secs".format(numHr, numMin, numSec)]
return strHrepdconfig.py
# /*****************************************************************************
# * | File : epdconfig.py
# * | Author : Waveshare team
# * | Function : Hardware underlying interface
# * | Info :
# *----------------
# * | This version: V1.2
# * | Date : 2022-10-29
# * | Info :
# ******************************************************************************
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documnetation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS OR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
#
import os
import logging
import sys
import time
import subprocess
from ctypes import *
logger = logging.getLogger(__name__)
class RaspberryPi:
# Pin definition
RST_PIN = 17
DC_PIN = 25
CS_PIN = 8
BUSY_PIN = 24
PWR_PIN = 18
MOSI_PIN = 10
SCLK_PIN = 11
def __init__(self):
import spidev
import gpiozero
self.SPI = spidev.SpiDev()
self.GPIO_RST_PIN = gpiozero.LED(self.RST_PIN)
self.GPIO_DC_PIN = gpiozero.LED(self.DC_PIN)
# self.GPIO_CS_PIN = gpiozero.LED(self.CS_PIN)
self.GPIO_PWR_PIN = gpiozero.LED(self.PWR_PIN)
self.GPIO_BUSY_PIN = gpiozero.Button(self.BUSY_PIN, pull_up = False)
def digital_write(self, pin, value):
if pin == self.RST_PIN:
if value:
self.GPIO_RST_PIN.on()
else:
self.GPIO_RST_PIN.off()
elif pin == self.DC_PIN:
if value:
self.GPIO_DC_PIN.on()
else:
self.GPIO_DC_PIN.off()
# elif pin == self.CS_PIN:
# if value:
# self.GPIO_CS_PIN.on()
# else:
# self.GPIO_CS_PIN.off()
elif pin == self.PWR_PIN:
if value:
self.GPIO_PWR_PIN.on()
else:
self.GPIO_PWR_PIN.off()
def digital_read(self, pin):
if pin == self.BUSY_PIN:
return self.GPIO_BUSY_PIN.value
elif pin == self.RST_PIN:
return self.RST_PIN.value
elif pin == self.DC_PIN:
return self.DC_PIN.value
# elif pin == self.CS_PIN:
# return self.CS_PIN.value
elif pin == self.PWR_PIN:
return self.PWR_PIN.value
def delay_ms(self, delaytime):
time.sleep(delaytime / 1000.0)
def spi_writebyte(self, data):
self.SPI.writebytes(data)
def spi_writebyte2(self, data):
self.SPI.writebytes2(data)
def DEV_SPI_write(self, data):
self.DEV_SPI.DEV_SPI_SendData(data)
def DEV_SPI_nwrite(self, data):
self.DEV_SPI.DEV_SPI_SendnData(data)
def DEV_SPI_read(self):
return self.DEV_SPI.DEV_SPI_ReadData()
def module_init(self, cleanup=False):
self.GPIO_PWR_PIN.on()
if cleanup:
find_dirs = [
os.path.dirname(os.path.realpath(__file__)),
'/usr/local/lib',
'/usr/lib',
]
self.DEV_SPI = None
for find_dir in find_dirs:
val = int(os.popen('getconf LONG_BIT').read())
logging.debug("System is %d bit"%val)
if val == 64:
so_filename = os.path.join(find_dir, 'DEV_Config_64.so')
else:
so_filename = os.path.join(find_dir, 'DEV_Config_32.so')
if os.path.exists(so_filename):
self.DEV_SPI = CDLL(so_filename)
break
if self.DEV_SPI is None:
RuntimeError('Cannot find DEV_Config.so')
self.DEV_SPI.DEV_Module_Init()
else:
# SPI device, bus = 0, device = 0
self.SPI.open(0, 0)
self.SPI.max_speed_hz = 4000000
self.SPI.mode = 0b00
return 0
def module_exit(self, cleanup=False):
logger.debug("spi end")
self.SPI.close()
self.GPIO_RST_PIN.off()
self.GPIO_DC_PIN.off()
self.GPIO_PWR_PIN.off()
logger.debug("close 5V, Module enters 0 power consumption ...")
if cleanup:
self.GPIO_RST_PIN.close()
self.GPIO_DC_PIN.close()
# self.GPIO_CS_PIN.close()
self.GPIO_PWR_PIN.close()
self.GPIO_BUSY_PIN.close()
class JetsonNano:
# Pin definition
RST_PIN = 17
DC_PIN = 25
CS_PIN = 8
BUSY_PIN = 24
PWR_PIN = 18
def __init__(self):
import ctypes
find_dirs = [
os.path.dirname(os.path.realpath(__file__)),
'/usr/local/lib',
'/usr/lib',
]
self.SPI = None
for find_dir in find_dirs:
so_filename = os.path.join(find_dir, 'sysfs_software_spi.so')
if os.path.exists(so_filename):
self.SPI = ctypes.cdll.LoadLibrary(so_filename)
break
if self.SPI is None:
raise RuntimeError('Cannot find sysfs_software_spi.so')
import Jetson.GPIO
self.GPIO = Jetson.GPIO
def digital_write(self, pin, value):
self.GPIO.output(pin, value)
def digital_read(self, pin):
return self.GPIO.input(self.BUSY_PIN)
def delay_ms(self, delaytime):
time.sleep(delaytime / 1000.0)
def spi_writebyte(self, data):
self.SPI.SYSFS_software_spi_transfer(data[0])
def spi_writebyte2(self, data):
for i in range(len(data)):
self.SPI.SYSFS_software_spi_transfer(data[i])
def module_init(self):
self.GPIO.setmode(self.GPIO.BCM)
self.GPIO.setwarnings(False)
self.GPIO.setup(self.RST_PIN, self.GPIO.OUT)
self.GPIO.setup(self.DC_PIN, self.GPIO.OUT)
self.GPIO.setup(self.CS_PIN, self.GPIO.OUT)
self.GPIO.setup(self.PWR_PIN, self.GPIO.OUT)
self.GPIO.setup(self.BUSY_PIN, self.GPIO.IN)
self.GPIO.output(self.PWR_PIN, 1)
self.SPI.SYSFS_software_spi_begin()
return 0
def module_exit(self):
logger.debug("spi end")
self.SPI.SYSFS_software_spi_end()
logger.debug("close 5V, Module enters 0 power consumption ...")
self.GPIO.output(self.RST_PIN, 0)
self.GPIO.output(self.DC_PIN, 0)
self.GPIO.output(self.PWR_PIN, 0)
self.GPIO.cleanup([self.RST_PIN, self.DC_PIN, self.CS_PIN, self.BUSY_PIN, self.PWR_PIN])
class SunriseX3:
# Pin definition
RST_PIN = 17
DC_PIN = 25
CS_PIN = 8
BUSY_PIN = 24
PWR_PIN = 18
Flag = 0
def __init__(self):
import spidev
import Hobot.GPIO
self.GPIO = Hobot.GPIO
self.SPI = spidev.SpiDev()
def digital_write(self, pin, value):
self.GPIO.output(pin, value)
def digital_read(self, pin):
return self.GPIO.input(pin)
def delay_ms(self, delaytime):
time.sleep(delaytime / 1000.0)
def spi_writebyte(self, data):
self.SPI.writebytes(data)
def spi_writebyte2(self, data):
# for i in range(len(data)):
# self.SPI.writebytes([data[i]])
self.SPI.xfer3(data)
def module_init(self):
if self.Flag == 0:
self.Flag = 1
self.GPIO.setmode(self.GPIO.BCM)
self.GPIO.setwarnings(False)
self.GPIO.setup(self.RST_PIN, self.GPIO.OUT)
self.GPIO.setup(self.DC_PIN, self.GPIO.OUT)
self.GPIO.setup(self.CS_PIN, self.GPIO.OUT)
self.GPIO.setup(self.PWR_PIN, self.GPIO.OUT)
self.GPIO.setup(self.BUSY_PIN, self.GPIO.IN)
self.GPIO.output(self.PWR_PIN, 1)
# SPI device, bus = 0, device = 0
self.SPI.open(2, 0)
self.SPI.max_speed_hz = 4000000
self.SPI.mode = 0b00
return 0
else:
return 0
def module_exit(self):
logger.debug("spi end")
self.SPI.close()
logger.debug("close 5V, Module enters 0 power consumption ...")
self.Flag = 0
self.GPIO.output(self.RST_PIN, 0)
self.GPIO.output(self.DC_PIN, 0)
self.GPIO.output(self.PWR_PIN, 0)
self.GPIO.cleanup([self.RST_PIN, self.DC_PIN, self.CS_PIN, self.BUSY_PIN], self.PWR_PIN)
if sys.version_info[0] == 2:
process = subprocess.Popen("cat /proc/cpuinfo | grep Raspberry", shell=True, stdout=subprocess.PIPE)
else:
process = subprocess.Popen("cat /proc/cpuinfo | grep Raspberry", shell=True, stdout=subprocess.PIPE, text=True)
output, _ = process.communicate()
if sys.version_info[0] == 2:
output = output.decode(sys.stdout.encoding)
if "Raspberry" in output:
implementation = RaspberryPi()
elif os.path.exists('/sys/bus/platform/drivers/gpio-x3'):
implementation = SunriseX3()
else:
implementation = JetsonNano()
for func in [x for x in dir(implementation) if not x.startswith('_')]:
setattr(sys.modules[__name__], func, getattr(implementation, func))
### END OF FILE ###epd2in13_V4.py
# *****************************************************************************
# * | File : epd2in13_V4.py
# * | Author : Waveshare team
# * | Function : Electronic paper driver
# * | Info :
# *----------------
# * | This version: V1.0
# * | Date : 2023-06-25
# # | Info : python demo
# -----------------------------------------------------------------------------
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documnetation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS OR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
#
import logging
# from . import epdconfig
import epdconfig
# Display resolution
EPD_WIDTH = 122
EPD_HEIGHT = 250
logger = logging.getLogger(__name__)
class EPD:
def __init__(self):
self.reset_pin = epdconfig.RST_PIN
self.dc_pin = epdconfig.DC_PIN
self.busy_pin = epdconfig.BUSY_PIN
self.cs_pin = epdconfig.CS_PIN
self.width = EPD_WIDTH
self.height = EPD_HEIGHT
'''
function :Hardware reset
parameter:
'''
def reset(self):
epdconfig.digital_write(self.reset_pin, 1)
epdconfig.delay_ms(20)
epdconfig.digital_write(self.reset_pin, 0)
epdconfig.delay_ms(2)
epdconfig.digital_write(self.reset_pin, 1)
epdconfig.delay_ms(20)
'''
function :send command
parameter:
command : Command register
'''
def send_command(self, command):
epdconfig.digital_write(self.dc_pin, 0)
epdconfig.digital_write(self.cs_pin, 0)
epdconfig.spi_writebyte([command])
epdconfig.digital_write(self.cs_pin, 1)
'''
function :send data
parameter:
data : Write data
'''
def send_data(self, data):
epdconfig.digital_write(self.dc_pin, 1)
epdconfig.digital_write(self.cs_pin, 0)
epdconfig.spi_writebyte([data])
epdconfig.digital_write(self.cs_pin, 1)
# send a lot of data
def send_data2(self, data):
epdconfig.digital_write(self.dc_pin, 1)
epdconfig.digital_write(self.cs_pin, 0)
epdconfig.spi_writebyte2(data)
epdconfig.digital_write(self.cs_pin, 1)
'''
function :Wait until the busy_pin goes LOW
parameter:
'''
def ReadBusy(self):
logger.debug("e-Paper busy")
while(epdconfig.digital_read(self.busy_pin) == 1): # 0: idle, 1: busy
epdconfig.delay_ms(10)
logger.debug("e-Paper busy release")
'''
function : Turn On Display
parameter:
'''
def TurnOnDisplay(self):
self.send_command(0x22) # Display Update Control
self.send_data(0xf7)
self.send_command(0x20) # Activate Display Update Sequence
self.ReadBusy()
'''
function : Turn On Display Fast
parameter:
'''
def TurnOnDisplay_Fast(self):
self.send_command(0x22) # Display Update Control
self.send_data(0xC7) # fast:0x0c, quality:0x0f, 0xcf
self.send_command(0x20) # Activate Display Update Sequence
self.ReadBusy()
'''
function : Turn On Display Part
parameter:
'''
def TurnOnDisplayPart(self):
self.send_command(0x22) # Display Update Control
self.send_data(0xff) # fast:0x0c, quality:0x0f, 0xcf
self.send_command(0x20) # Activate Display Update Sequence
self.ReadBusy()
'''
function : Setting the display window
parameter:
xstart : X-axis starting position
ystart : Y-axis starting position
xend : End position of X-axis
yend : End position of Y-axis
'''
def SetWindow(self, x_start, y_start, x_end, y_end):
self.send_command(0x44) # SET_RAM_X_ADDRESS_START_END_POSITION
# x point must be the multiple of 8 or the last 3 bits will be ignored
self.send_data((x_start>>3) & 0xFF)
self.send_data((x_end>>3) & 0xFF)
self.send_command(0x45) # SET_RAM_Y_ADDRESS_START_END_POSITION
self.send_data(y_start & 0xFF)
self.send_data((y_start >> 8) & 0xFF)
self.send_data(y_end & 0xFF)
self.send_data((y_end >> 8) & 0xFF)
'''
function : Set Cursor
parameter:
x : X-axis starting position
y : Y-axis starting position
'''
def SetCursor(self, x, y):
self.send_command(0x4E) # SET_RAM_X_ADDRESS_COUNTER
# x point must be the multiple of 8 or the last 3 bits will be ignored
self.send_data(x & 0xFF)
self.send_command(0x4F) # SET_RAM_Y_ADDRESS_COUNTER
self.send_data(y & 0xFF)
self.send_data((y >> 8) & 0xFF)
'''
function : Initialize the e-Paper register
parameter:
'''
def init(self):
if (epdconfig.module_init() != 0):
return -1
# EPD hardware init start
self.reset()
self.ReadBusy()
self.send_command(0x12) #SWRESET
self.ReadBusy()
self.send_command(0x01) #Driver output control
self.send_data(0xf9)
self.send_data(0x00)
self.send_data(0x00)
self.send_command(0x11) #data entry mode
self.send_data(0x03)
self.SetWindow(0, 0, self.width-1, self.height-1)
self.SetCursor(0, 0)
self.send_command(0x3c)
self.send_data(0x05)
self.send_command(0x21) # Display update control
self.send_data(0x00)
self.send_data(0x80)
self.send_command(0x18)
self.send_data(0x80)
self.ReadBusy()
return 0
'''
function : Initialize the e-Paper fast register
parameter:
'''
def init_fast(self):
if (epdconfig.module_init() != 0):
return -1
# EPD hardware init start
self.reset()
self.send_command(0x12) #SWRESET
self.ReadBusy()
self.send_command(0x18) # Read built-in temperature sensor
self.send_command(0x80)
self.send_command(0x11) # data entry mode
self.send_data(0x03)
self.SetWindow(0, 0, self.width-1, self.height-1)
self.SetCursor(0, 0)
self.send_command(0x22) # Load temperature value
self.send_data(0xB1)
self.send_command(0x20)
self.ReadBusy()
self.send_command(0x1A) # Write to temperature register
self.send_data(0x64)
self.send_data(0x00)
self.send_command(0x22) # Load temperature value
self.send_data(0x91)
self.send_command(0x20)
self.ReadBusy()
return 0
'''
function : Display images
parameter:
image : Image data
'''
def getbuffer(self, image):
img = image
imwidth, imheight = img.size
if(imwidth == self.width and imheight == self.height):
img = img.convert('1')
elif(imwidth == self.height and imheight == self.width):
# image has correct dimensions, but needs to be rotated
img = img.rotate(90, expand=True).convert('1')
else:
logger.warning("Wrong image dimensions: must be " + str(self.width) + "x" + str(self.height))
# return a blank buffer
return [0x00] * (int(self.width/8) * self.height)
buf = bytearray(img.tobytes('raw'))
return buf
'''
function : Sends the image buffer in RAM to e-Paper and displays
parameter:
image : Image data
'''
def display(self, image):
self.send_command(0x24)
self.send_data2(image)
self.TurnOnDisplay()
'''
function : Sends the image buffer in RAM to e-Paper and fast displays
parameter:
image : Image data
'''
def display_fast(self, image):
self.send_command(0x24)
self.send_data2(image)
self.TurnOnDisplay_Fast()
'''
function : Sends the image buffer in RAM to e-Paper and partial refresh
parameter:
image : Image data
'''
def displayPartial(self, image):
epdconfig.digital_write(self.reset_pin, 0)
epdconfig.delay_ms(1)
epdconfig.digital_write(self.reset_pin, 1)
self.send_command(0x3C) # BorderWavefrom
self.send_data(0x80)
self.send_command(0x01) # Driver output control
self.send_data(0xF9)
self.send_data(0x00)
self.send_data(0x00)
self.send_command(0x11) # data entry mode
self.send_data(0x03)
self.SetWindow(0, 0, self.width - 1, self.height - 1)
self.SetCursor(0, 0)
self.send_command(0x24) # WRITE_RAM
self.send_data2(image)
self.TurnOnDisplayPart()
'''
function : Refresh a base image
parameter:
image : Image data
'''
def displayPartBaseImage(self, image):
self.send_command(0x24)
self.send_data2(image)
self.send_command(0x26)
self.send_data2(image)
self.TurnOnDisplay()
'''
function : Clear screen
parameter:
'''
def Clear(self, color=0xFF):
if self.width%8 == 0:
linewidth = int(self.width/8)
else:
linewidth = int(self.width/8) + 1
# logger.debug(linewidth)
self.send_command(0x24)
self.send_data2([color] * int(self.height * linewidth))
self.TurnOnDisplay()
'''
function : Enter sleep mode
parameter:
'''
def sleep(self):
self.send_command(0x10) #enter deep sleep
self.send_data(0x01)
epdconfig.delay_ms(2000)
epdconfig.module_exit()
### END OF FILE ###